| |
|
Lunny Poligon concept
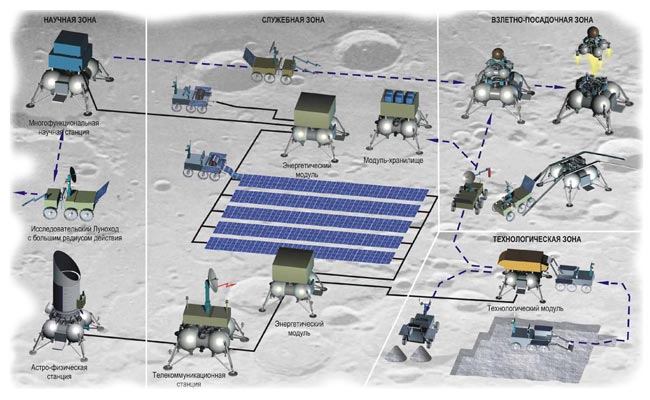
Above: Key elements of the Lunny Poligon concept. Credit: NPO Lavochkin
As envisioned at the beginning of the 21st century by NPO Lavochkin engineers, the ultimate goal of the Russian unmanned lunar exploration program would be the establishment of a robotic base on the Moon, known in Russian as Lunny Poligon - or Lunar Range. According to the bold and innovative idea, the facility could be used for scientific research, and for trying out industrial activities on the Moon, such as prospecting and mining of lunar minerals. Key transport components of this lunar facility, including Fregat-based booster stages, landing platforms, ascent stages and rovers, would be based on hardware developed for previous Russian missions, such as Luna-Glob, Luna-Resurs and Luna-Grunt. Eventually, the components of the base and its resources, (such as energy and communications), could be rented out to state-run or private institutions in science and industry around the world. Naturally, the robotic test range could also provide a foundation and the logistical support for a future manned base on the lunar surface. According to some sources, the most suitable locations for the robotic base would be near possible sources of water. If such locations, for example polar areas, happen to coincide with areas of constant sunlight, the base could be powered by solar energy. Potentially, local water could be recycled into hydrogen for use as rocket propellant. Moreover, the South Pole of the Moon was singled out as a specially attractive for astronomy, since it would enable observations of the center of the Milky Way galaxy. As of 2006, Lunny Poligon would be subdivided into four major areas:
Highly specialized rovers would be used for the initial construction of the base, as well as for service, maintenance and logistical support of the operational facility. NPO Lavochkin's documents showed rovers designed to lay down cables and flexible solar panels, scrapers and mobile repair trucks with remotely controlled robotic arms. Depending on the location of the base, lunar-orbiting satellites could facilitate communications between the base and ground control. At the beginning of 2010s, the deployment of the Lunny Poligon was promised as early as 2021, however by the middle of the decade, the project had to be postponed to the second half of 2020s at the earliest.
|
|