|
 |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
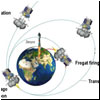
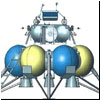
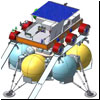
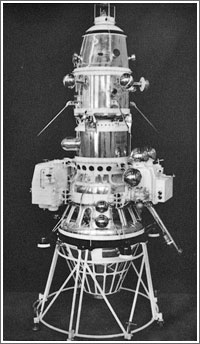
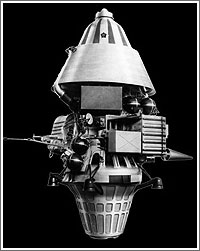
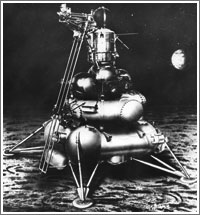
The Soviet E6 Luna lander in configuration for a cruise to the Moon. The USSR pioneered the exploration of the Moon with the E series of robotic probes. They likely got their designation in the mid-to-late 1950s, when letters of the Russian alphabet were assigned to planned payloads of the R-7 intercontinental ballistic missile under development at the time, with letters A, B and V given to different types of nuclear warheads and the letter D reserved for the first satellite. Within the E series, several progressively complex missions were proposed:
From the late 1950s to 1965, the E-series were under development at the OKB-1 design bureau in Podlipki, after which all ongoing projects, starting with the E6 series were transferred to design bureau of the Lavochkin aviation plant in Khimki. Below is a complete list of Soviet and Russian attempts to send robotic spacecraft to our natural satellite:
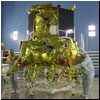
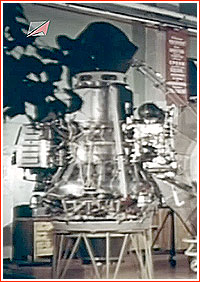
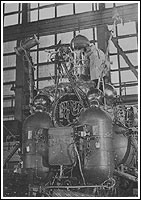
Assembly of the E6 lunar probe circa 1963. Like many official buildings and institutions in the USSR, the facility features the "red corner" (on the left) featuring "Udarniki of the Communist Labor" (best workers list) adorned with a portrait of the USSR founder Vladimir Lenin, a hammer and a sickle (symbol of the workers and peasants union in the class struggle) and... potted flowers!
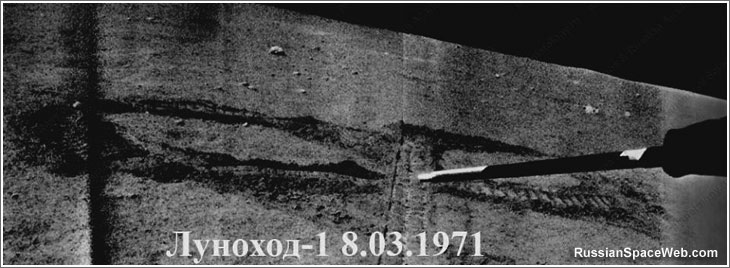
To mark the International Women's Day on March 8, operators of Lunokhod-1 drew an 8 with its wheels on the lunar surface in March 1971. Although the USSR virtually abandoned lunar exploration with the end of the Moon race in mid-1970s, Russian scientists still saw the Moon as an interesting target for exploration. During the 1980s, a lunar polar orbiter, LSN (1L), was one of several space missions proposed for a new spacecraft platform developed at NPO Lavochkin. However, at the time, the lunar mission lost in priority to Mars-bound projects. Multi-phased program With the improvement of the Russian economy in the second post-Soviet decade, Russia started developing a multi-step program for the unmanned lunar exploration. According to that strategy, the first Luna-Glob lunar orbiter could be followed by a lander, which was initially known as Luna-Glob-2 and was later designated Luna-Resurs. A standard lander developed for the Luna-Resurs project could be reused for further missions to the Moon and beyond. Luna-Resurs was expected to be followed by the Luna-Grunt dual mission, which would carry a rover and the ascent stage to return lunar samples back to Earth. Hardware developed for Luna-Glob, Luna-Resurs and Luna-Grunt missions could ultimately be used to establish the so-called Lunny Poligon (Lunar Range), featuring a series of stationary and movable facilities on the surface of the Moon. 2012: New plans, launch dates emerge Following the Phobos-Grunt fiasco in November 2011, a new Russian plan for unmanned lunar exploration had emerged by the beginning of 2012. Although launch dates of the upcoming missions had to be delayed in order to learn the lessons of Phobos-Grunt, the unmanned lunar exploration program received a priority among planetary missions. Relative proximity of the Moon could enable Russian engineers to regain experience in navigating deep-space missions and rebuilt Soviet potential in planetary landing. A total of five launches were now planned, with an ultimate goal of delivering samples of the lunar soil back to Earth following a decade-long effort. The original Luna-Glob mission was split into a landing mission and an orbiter. 2014: Russian Moon missions face three-year delayBy 2014, unmanned lunar missions designed to revive Russia's troubled deep-space exploration program were postponed three years beoynd originally advertised dates. An official announcement of the nation's space science program at a major scientific summit in Moscow revealed significantly delayed launch dates for a trio of lunar probes. During the 40th assembly of the Committee on Space Research, COSPAR, in Moscow in August 2014, Lev Zeleny, the director of the Space Research Institute, IKI, revealed latest schedule for the Russian planetary exploration and space science program. Although all previously approved projects still remained on the table, the nation's series of lunar missions faced a domino effect of delays. 2019: Russia plans to reshape, extend its lunar robotic strategy With the start of the super-rocket program in Russia in 2018, the prime contractor in the development of Russian lunar probes drafted new long-term strategy for supporting human expeditions to the lunar surface. In the first week of July 2019, NPO Lavochkin presented its latest vision of the robotic lunar exploration program and outlined new mission concepts extending as far as two decades ahead. Planning begins for Luna-29 mission In the late 2010s, Russian engineers at NPO Lavochkin began early formulation work on the concept of the heavy Luna-29 lander which is expected to follow four smaller robotic missions to the surface of the Moon. The effort was part of a wider plan to expand the Russian lunar exploration program and prepare human missions to our natural satellite. To that end, the new lander developed for the Luna-29 project could later serve as a platform for a cargo delivery system to the surface of the Moon. 2020: How sample return prepares human expeditions to the Moon In 2020, the Russian space industry continued the design of a multi-purpose lunar landing vehicle which was expected to start its flight career as a platform for a soil-sample return mission from the Moon, but later become a common carrier of cargo and even crews to the lunar surface. In the following two years, the developers advanced the project through numerous technical and organizational challenges. 2020: New Lunokhod is in the works for Luna-29 Russian engineers recently began work on a large lunar rover mission rivaling the famous Soviet Lunokhod. As of 2020, the Luna-29 mission was expected to deliver a large wheeled laboratory to the surface of the Moon before the end of the decade. Like its pioneering predecessor, the new rover was conceived at the NPO Lavochkin design bureau. 2020: Russian lunar sample return mission (Luna-28) at the crossroad In its original concept, Luna-28 was a part of the Luna-Grunt robotic soil-sampling mission designed to return lunar regolith from the polar region of the Moon back to Earth for scientific analysis. However, in 2020, the project was given the overarching task of serving as pathfinder for human expeditions. Luna-Grunt in 2021: Scientists push back against lunar program strategy By early 2021, Roskosmos planned to give the role of robotic pathfinder for human expeditions to the Moon to the Luna-28 sample-return spacecraft. According to the proposed strategy, a large lunar landing platform would travel to the Moon, testing crucial technologies for a subsequent human landing. But the idea did not sit well with Russian scientists. Russian lunar missions face new delays in 2023 On the heels of the successful launch of the Luna-Glob (Luna-25) mission on Aug. 11, 2023, Head of Roskosmos Yuri Borisov said that the launch of the Luna-26 (Luna-Resurs Orbiter) spacecraft was then planned for 2027, followed by Luna-27 (Luna-Resurs Lander) in 2028 and by Luna-28 (Luna-Grunt) in 2030 or later. Despite being pushed back from the previous plans, these dates had to be considered very optimistic given the need for a complete overhaul of these projects in order to replace imported components and instruments, not to mention funding levels in the program.
|