|
|
||||||||||||||||||||||
Luna-Glob's stop and go In 2017, Russia's pathfinder mission to the lunar surface continued crawling through the development process, transitioning from blueprints and mockups to flight-worthy components. But limited resources and other priorities kept the launch date for the Luna-Glob clouded in uncertainty.
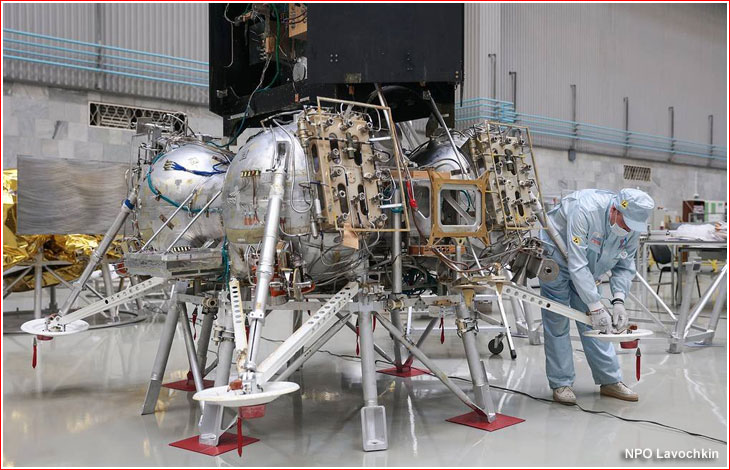
A file photo of the Luna-Glob prototype during assembly at NPO Lavochkin circa 2015.
Spacecraft manufacturing begins By the end of January 2017, Lavochkin said that the propulsion system for the lunar lander had been in assembly, along with support systems for the antenna feeder and the holding truss for the onboard equipment of the Luna-Glob lander. (824) The chief engineer at Lavochkin was also quoted as saying that a loads simulator for the spacecraft was in assembly. In the first half of 2017, NPO Lavochkin also reported the completion of a stand for flow tests of the propellant system and the facility for weightless tests of the landing dynamics. European cooperation In April 2017, the Head of NPO Lavochkin Sergei Lemeshevsky confirmed that Europe would provide high-resolution camera system, known as Pilot-D, intended to document the landing of the Luna-Glob spacecraft. However, the visual data from the cameras will not be analyzed by the flight control system in real time to augment its operation during landing of the Luna-Glob, as had been considered earlier. Instead, the process will be tested during the decent of Luna-Glob for a possible practical use during the subsequent landing of the Luna-Resurs spacecraft, Lemeshevsky said. (825) The first models of the demonstration cameras for the Luna-Glob mission were shipped to IKI. They were inspected and handed over in December 2016 at the ESA Moscow Office. According to ESA, the Phase B2 development for the Pilot-D system started in May 2017. At the beginning of June, the interface emulator model for the Pilot-D system was delivered to the Space Research Institute, IKI, in Moscow. In the third quarter of 2017, ESA said that the overall schedule for the Pilot-D system had remained very critical. The delivery of the Interface Unit EM (also called CDIU) had to be postponed from mid-August (as requested by IKI) to October. (830) Development and launch status In May, NPO Lavochkin revealed that the Luna-Glob faced a deficit in mass and power, but according to the company, the project team had a roadmap for how to resolve the problem on both fronts. On the plus side, the company also said that all the contracts for the Luna-Glob project had been signed and the manufacturing (of the spacecraft components) was proceeding at full swing. At the time, a development mockup of the lander was in the final stage of assembly and another prototype for thermal tests was also being prepared. In fact, on August 18, Roskosmos announced that it had formally accepted the development mockup of the lunar lander built during the 3.5-year-long development phase of the Luna-Glob project. In the meantime, on July 29, NPO Lavochkin said it had completed the 7th phase of the Luna-Glob development project, while catching up with a potentially lagging schedule during that phase. (826) Before the end of 2017, the antenna mockup of the Luna-Glob was assembled and transferred for testing. The design mockup was also completed and tested, as was the thermal mockup. The components of the antenna feeder system were also assembled and transferred for preliminary tests. At the time, the launch of the spacecraft was still promised at the end of 2019 from Vostochny. (825) However in the course of 2017, the mission moved back to Baikonur, probably in order to cut costs for building new processing facilities for the spacecraft in Vostochny. Moreover, industry sources said that the launch date for Luna-Glob would most likely slip beyond 2019. Counting the fact, that NPO Lavochkin was the main Russian contractor on the ExoMars rover mission, then scheduled for launch in 2020 and enjoying the highest priority as an international project, the chances for Luna-Glob to fly within the same time frame were probably slim to none. In the meantime, the lander's already constrained scientific payload (INSIDER CONTENT) saw a likely fallout from the increasing mass deficit in the Luna-Glob project. On October 31, the Space Council of the Academy of Sciences officially dropped the Termo-L instrument from the mission. Developed at Vernadsky GEOKhI institute in Moscow, the Termo-L sensor would be lowered from the lander and press a miniature heater against the lunar surface to study the thermal conducting properties of the lunar regolith. Unfortunately, the latest tests at GEOKhI's lab revealed the need for considerable upgrades in the instrument, which would increase its mass beyond the limits imposed on the scientific payloads of the mission. As a result, the experiment was bumped to the follow-on Luna-Resurs lander.
Known specifications of the Luna-Glob lander circa 2017:
|
|
|||||||||||||||||||||