|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
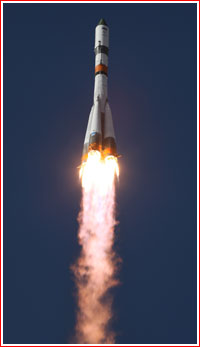
Soyuz-MS crew spacecraft variant After nearly half a century of orbital missions, Russia's veteran transport spacecraft got another upgrade with the Soyuz-MS version (also know as Series 730, or Article 11F732 (INSIDER CONTENT). The first mission of the Soyuz MS spacecraft began on July 7, 2016. The spacecraft carried a crew of three to the International Space Station, ISS. Soyuz-MS superseded the Soyuz-TMA-M variant (Series 700).
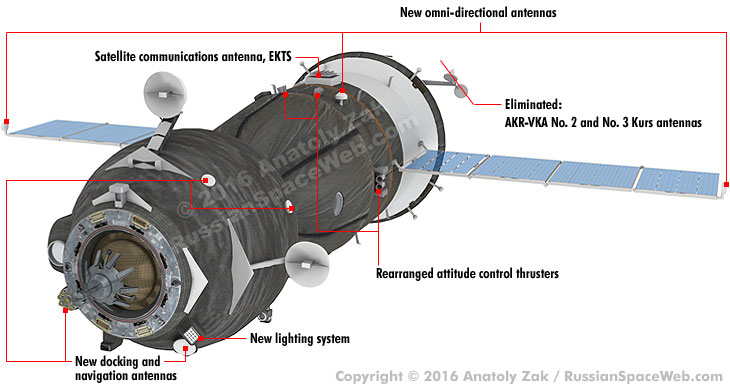
Key new external features of the Soyuz-MS variant. Soyuz-MS (11F732) specifications:
Technical guide to Soyuz-MS main components:
The work that never stops Even before the introduction of the Soyuz TMA-M variant in October 2010, Russian engineers already had a long list of upgrades, which had not made it into then new version, but had to be implemented at a later date. Many of these improvements were dictated not so much by a desire to improve the spacecraft itself, but by the need to replace obsolete components which were going out of production or had to be imported from outside Russia, primarily from Ukraine. As of 2010, the "wish list" of future upgrades included the following new systems:
In addition, the Soyuz was expected to receive extra thrusters for the rendezvous and orientation system (dvigately prichalivaniya i orientatsii, DPO-B) and the associated avionics unit (Blok Avtomatiki, BA DPO) would be upgraded to reflect that change. The SSVP docking port aboard Soyuz would receive backup electric motors. The new and upgraded systems also required a number of changes in associated systems, such as the Motion Control System, SUDN; the Onboard Equipment Control System, SUBK; Communications System, STR; and the Rendezvous Radio System, RTS. At NASA's request, Russian engineers also developed an Additional Anti-meteoroid Shielding or DPM, for the Habitation Module, BO, of the Soyuz spacecraft. Finally, various improvements in electricity-generating solar panels were also under consideration.
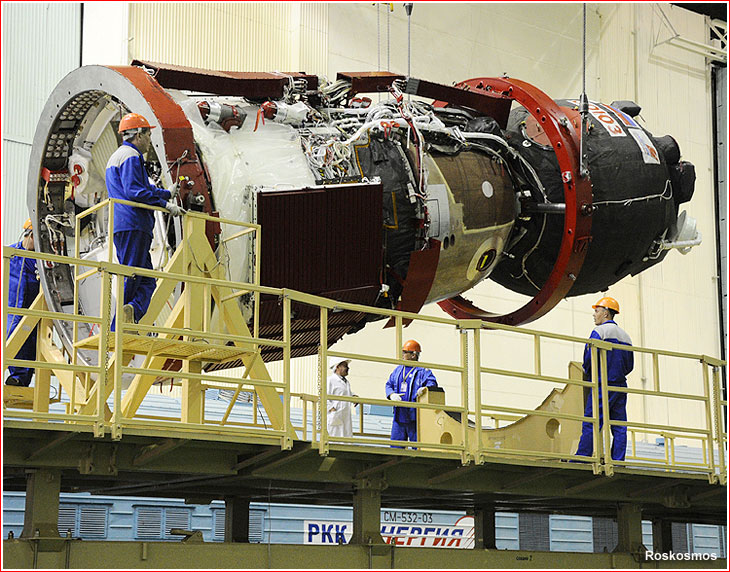
First flight-worthy Soyuz MS spacecraft during processing in Baikonur. Development history According to early plans, most of the extras which could not make it into the Soyuz TMA-M upgrade in 2010, would be introduced step-by-step into the future production versions of the TMA-M variant. As of 2010, RKK Energia hoped to complete the upgrades in just two and a half years. (566) In November of that year, the Interfax news agency quoted the following timeline for three key features of the upgrade program:
At the time, as many as 18 various replacements and design changes were planned for the Soyuz TMA-M spacecraft:
(782) In reality, the effort to upgrade Soyuz TMA-M took six years to complete. Eventually, most of the planned upgrades were consolidated into a single program for both Progress cargo ships and Soyuz transport vehicles. The project became known as Progress-MS and Soyuz-MS, where MS stood for "modernized systems." As in many previous upgrades, the new features would be tried first on robotic cargo ships before their certification for use on piloted vehicles. In addition, many of the improvements for the MS series could later be directly incorporated or otherwise benefit the development of the next-generation transport ship, PTK NP. During the Moscow Air and Space Show in 2011, the head of RKK Energia promised to complete the upgrades for the MS series by the end of 2013 or beginning of 2014. However by 2012, the first launch of the Soyuz-MS spacecraft (No. 731) slipped to the first half of 2015, following the first test flight of the Progress-MS (No. 431) planned in the second half of 2014. Later, various delays eventually pushed the first Soyuz-MS mission into 2016. During 2013, RKK Energia developed and produced documentation for the Soyuz-MS spacecraft. The company also began manufacturing components and developed blueprints for the integrated electric test stand, KS, for the modified spacecraft. RKK Energia also built a common container for transporting both Progress-MS and Soyuz-MS vehicles and prepared for its testing. The ground test program also called for the development of a dynamic prototype of the Soyuz-MS. Beginning in 2017, the Soyuz-MS was expected to fully replace the Soyuz TMA-M spacecraft. According to Russian officials, some of the planned upgrades would still be implemented after the launch of the first Soyuz-MS.
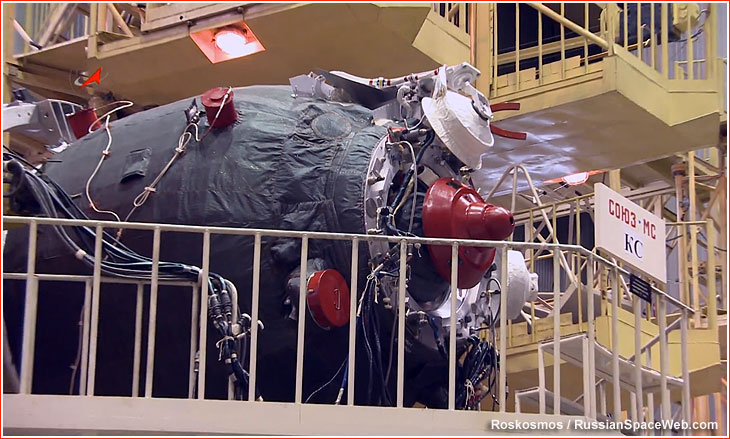
An integrated simulator, KS (from the Russian "Kompleksny Stend"), of the Soyuz-MS spacecraft at RKK Energia's checkout and testing station, KIS. SOYUZ-MS UPGRADED SYSTEMS: SUDN flight control and navigation system Most significant upgrades within the Soyuz-MS series dealt with various components of the Flight Control and Navigation System, SUDN, (from Russian Sistema Upravleniya Dvizheniem i Navigatsii). ASN-K satellite navigation system To measure the orbital parameters of the Soyuz and Progress spacecraft, the ships' Flight Control and Navigation System, SUDN, relied on the 38G6 transmitters communicating with six Kama ground stations and Kvant-P ground terminals. By 2010, all these facilities and hardware were marked for retirement and was to be replaced with the ASN-K satellite navigation system, which could simultaneously use the GPS and GLONASS navigation satellites. The system would allow autonomous trajectory measurements by the ship's computers without reliance on ground stations. According to RKK Energia, which developed the system, the ASN-K consists of four antennas, which are mathematically linked into a single virtual system, allowing uninterrupted navigation measurements independent from a particular orientation of the spacecraft in space. The system provides positioning accuracy within five meters. The ship's attitude (orientation in space) is determined with an accuracy of 0.5 degrees. During a rendezvous, relative coordinates can be determined within one meter and there are hopes to improve the accuracy to just three or four centimeters. The ASN-K system was first flown on the Progress-M-25M cargo ship in October 2014. Additional tests in support of the ASN-K development were also conducted on the ISS. In April 2016, RKK Energia declared flight testing of ASN-K completed. According to RKK Energia, the new system is five or six times cheaper than its foreign counterparts thanks to the transfer of many functions from hardware to software. Along with its use on the MS series, RKK Energia promised to install the ASN-K equipment on the next-generation transport ship, PTK. To reach their destination in the Earth's orbit, all spacecraft of the MS series, including Soyuz-MS and Progress-MS were equipped with the new Kurs-NA rendezvous system. It replaced the Kurs-A system, which had been in use since 1986 and employed key components built at the Kiev Radio Plant in Ukraine. To end dependency on foreign suppliers, the production of the new Kurs-NA system was consolidated at the Izhevsk Radio Plant in Russia. Integrated Propulsion System, KDU The placement of the 28 attitude control thrusters, DPOs, which are part of the Integrated Propulsion System (Kombinirovannaya Dvigatelnaya Ustanovka, KDU) was rearranged on Soyuz-MS to provide full redundancy between the two independent propellant loops. Angular velocity sensors The production of the angular velocity sensors, BDUS-3M (for Blok Datchikov Uglovykh Skorostei), which were used by the flight control system was to be discontinued after 2011. Instead, modified sensors, designated BDUS-3A, were first flight-tested on Progress-MS-01 spacecraft and were then certified for the use on Soyuz-MS. Motion and Orientation Control Avionics, BUPO A number of avionics went out of production in the Motion and Orientation Control Unit, BUPO, (from Russian Blok Upravleniya Peremesheniem i Orientatsiei). The latter was replaced with a new digital control unit dubbed Blok Upravleniya Rezervnym Konturom, BURK, which can be translated as the Backup Loop Control Unit. Developed at RKK Energia, the new avionics system was first tested on Progress-MS. The existing Kvant-V radio-command system, BRTS, (which stands for Bortovaya Radio-tekhnicheskaya Sistema) developed at AO RKS became obsolete, primarily because it had no ability to communicate via satellites. As a result, Soyuz was able to contact mission control and receive commands only within direct view of ground stations on the Russian territory. Klest-M TV system A new digital television system, TVS, which replaced an older Klest (crossbill) analog TV, allows transmission between the transport ship and the space station via onboard radio channels. According to TASS, the new system uses MPEG-2 encoding and promises to improve TV image quality and make the transmissions less susceptible to interference. As before, the new television system will provides footage from the inside of the spacecraft as well as images from an external camera in the front of the vehicle, which are available to Soyuz pilots and to mission controllers during docking. In addition to its original function on Soyuz-MS, the TV system can be integrated into the rendezvous process to facilitate the guidance of the spacecraft toward its target. The Kurs-NA automated rendezvous system was designed to be activated at a distance of around of 150 kilometers from the station and provide coordinates of the station to the Soyuz's flight control system and its crew. Then, at a distance of 80 kilometers, comes the activation of the TV system, which can now beam images between both vehicles participating in the rendezvous, which should help in determining mutual coordinates between the transport ship and its destination. (783) Location and communications system The descent module of the Soyuz-MS was equipped with modern Kospas-Sarsat transmitters and GPS/GLONASS navigation systems to help rescue services determine the capsule's position during the descent and after its landing. A special GPS receiver was placed on the hatch of the descent module to enable the capsule to determine its position during the parachute descent. Then, the Kospas-Sarsat transponder within the radio system sends that location to the mission control in Korolev. Testing of this system was conducted during two missions of the Soyuz spacecraft in 2011. According to ISS Reshetnev, the accuracy of locating the descent module in any weather reached between five and 10 meters. The upgraded information recording system for Soyuz-MS, designated SZI-M and developed at AO RKS corporation, uses modern, domestically produced electronics. Installed under a pilot seat inside the descent module, SZI-M will act as a "black box," collecting and storing a multitude of flight data, including technical information, physiological parameters of the crew members and voice communications during the descent and landing. One of the latest challenges in upgrading the Soyuz was the limitation of the ship's power-supply system. Many new systems were coming with an increasing demand for electricity, which available solar panels and storage batteries had an increasingly hard time to provide. According to estimates made around 2010, the power consumption of around eight amperes aboard the Soyuz-T variant introduced at the beginning of the 1980s, was expected to grow to as much as 14.2 amperes on the Soyuz-TMA-M spacecraft (then still in development under a designation Series 700). (780) Meteoroid Protection System, DPM Satisfying a long-standing request from NASA, RKK Energia introduced additional shielding to protect the thin walls of the habitation module, BO. It was designed to protect the most vulnerable part of the spacecraft in the unlikely but not impossible event of a meteoroid or space junk strike. According to some reports, the measure could also play a radiation-protection role, even though, the Soyuz flies well below the Earth's radiation belts and, normally, the crew exposure to radiation is insignificant. According to NASA, the additional protection of the habitation module has been in place since the mission of the Soyuz TMA-04M spacecraft, as projected by the original plan from 2010. Docking lighting system By 2010, the Lisma-Postarm company in Saransk, Russia, could no longer guarantee the supply of KGZ 12-100 halogen light bulbs for the SMI-4 lights, which were used to illuminate the target during docking. Instead, the MS series received a new LED-based lighting system, SFOK, which was first tested on the Progress-MS-01 spacecraft. Preparing the Soyuz-MS transition Continuing a long tradition of cargo ships serving as test vehicles for hardware and techniques intended for future cosmonaut flights, the Progress MS-07 mission in October 2017 was used to rehearse the transition of the Soyuz-MS spacecraft from the Soyuz-FG to the Soyuz-2-1a rockets. Cosmonaut launches to move to the 2.1a variant of the Soyuz rocket One critical step remaining unfulfilled with the introduction of the Soyuz-MS series was the transfer of the spacecraft from the older FG rocket variant to the newer Soyuz-2-1a launcher. The integrated Soyuz-2-1a launch vehicle with the Soyuz-MS spacecraft recieved an industrial designation 371KK35. The Astra diagnostics system According to the Plan of Corrective Measures No. 13-pl approved on Feb. 14, 2017, in the wake of the Progress MS-04 launch accident, the Soyuz MS spacecraft was supposed to be equipped with the Universal Small-scale Radio-telemetry System, UMRTS, which could be a great help in the investigation of the mishap. The new Astra-06 avionics unit, developed at NPO IT in Korolev, was expected to replace the originally planned Skut-40 system to monitor extremely fast-changing parameters during the ascent to orbit and the separation of the spacecraft from the launch vehicle within the Onboard Measurement System, SBI. It was a part of a wider plan to thoroughly analyze flight dynamics of the Soyuz rockets carrying transport ships in order to prevent accidents. Along with the Astra system, a network of sensors would be installed on the exterior of Progress and Soyuz vehicles to measure impacts and vibrations during the flight. It included six accelerometers ALE048-1 and nine vibration data converters ANS114-01. In order to control the Astra's equipment, the BOKP 11F732.7421-0A5 instrument in the flight control system was upgraded, along with its software and necessary wiring added. Finally, a special antenna, called SLIYu.464611.001, was installed on the exterior of the Instrument and Aggregate Module, PAO, to transmit data from the Astra system. The Astra-06 system was apparently first tested aboard the ill-fated Soyuz-2-1b rocket launched from Vostochny on Nov. 28, 2017. It then flew on the Soyuz MS spacecraft, starting with Vehicle No. 740 (Soyuz MS-10) and on Progress MS vehicles, starting with the Progress MS-10 (No. 440) mission, launched on Nov. 16, 2018. On Dec. 12, 2018, AO RKS Corporation, the parent company of NPO IT, confirmed that the Astra had been aboard the Soyuz MS-10 spacecraft, launched on Oct. 11, 2018, but the new telemetry system had never had a chance to operate due to a launch abort. However, the Astra-06 set successfully performed aboard the Soyuz MS-11 spacecraft in December 2018, RKS Corporation said. Soyuz MS-14 certifies new systems for launch, landing
Specialists work with the Descent Module of the Soyuz MS-14 spacecaft shortly after its touchdown on September 7, 2019. Thanks to the absence of crew aboard the Soyuz MS-14 spacecraft launched in August 2019, developers had an opportunity to test several new systems for the Soyuz MS series, in addition to the flight's primary goal of certifying the Soyuz-2-1a rocket for carrying people. In particular, the controlled descent component of the ship's motion control and navigation system was upgraded for the flight of Soyuz MS-14. The older analog descent control system was now completely replaced with a digital equivalent based on the instrument known in Russian as BIUS (for Blok Integrirovaniya Uglovykh Skorostei) which can be translated into English as the Unit for Integration of Angular Velocity. The device was developed at RKK Energia and previously operated as a backup to the analog system in the so-called "indicator mode" during the flights of Soyuz MS-04, MS-06 and MS-11 spacecraft. According to industry sources, the new components of the landing system tested during the Soyuz MS-14 mission also included the Automation Unit for Descent Control System, BASIO-S (Blok Avtomatiki Ispolnitelnykh Organov Spuska), the Three-phase Static Converter PTS-250RN (Preobrazovatel Trekhfazny Statichesky) and Coordination Device Units BSU-R and BSU-5M (Bloki Soglasuyushikh Ustroistv). During the chief designers meeting on August 28, 2019, the Head of RKK Energia Nikolai Sevastyanov stressed that due to these changes, the landing of the Soyuz MS-14 spacecraft would be of a particular importance. In addition, during the ascent to orbit, the Soyuz MS-14 also fully relied for the first time on the new Angular Velocity Indicator, TVIUS (Trekhosny Volnovoi Izmeritel Uglovoi Skorosti), which previously operated in the indicator mode during Soyuz MS-11 and Progress MS-11 missions. Ultimately, the successful launch of Soyuz MS-14 in August 2019, cleared the Soyuz-2-1a vehicle for carrying crews beginning in 2020, or around 16 years after that rocket variant had begun flying. The landing of Soyuz MS-14 during the night from September 6 to September 7 also went well. Writing on behalf of the robot Fedor soon after its touchdown, Roskosmos announced that the testing of the new landing system went without a hitch. Overall, the continuous upgrades to the Soyuz-MS and Progress-MS series can be grouped in following categories:
Soyuz-MS gets backup avionics after an incident (INSIDER CONTENT) Soon after entering orbit on July 20, 2019, the Soyuz MS-13 spacecraft entered orbit but shortly thereafter it experienced a power-supply problem which eventually prompted the developers to install a second avionics unit that was affected by the failure. Soyuz MS-14's sensor issue triggers fleet-wide upgrade (INSIDER CONTENT) A pre-launch failure of the pressure sensor aboard the Soyuz MS-14 spacecraft prompted the developer to install a brand-new measuring system on all future Progress cargo ships and Soyuz crew vehicles. Soyuz MS-14 landing triggers changes (INSIDER CONTENT) The landing of the unpiloted Soyuz MS-14 spacecraft on Sept. 7, 2019, appears to involve a switch from a nominal aerodynamic atmospheric reentry to an emergency ballistic descent, even though that fact has never been publicly disclosed. Soyuz-MS transitions from Soyuz-FG to Soyuz-2 rocket Backdropped by a pandemic, the Soyuz MS-16 spacecraft lifted off on April 9, 2020, marking the first mission of the Soyuz-2-1a rocket variant to deliver people into orbit. After years of preparations and flight tests, the launch completed the transition of the Russian piloted space program from the Soyuz-FG version, which relied on the flight control system built in Ukraine. Upgrading Soyuz MS to indigenously produced avionics (INSIDER CONTENT) After the introduction of the Soyuz MS variant in 2016, its developers continued going down the chain of sub-systems with more upgrades and replacements. In part, this work was dictated by the need to replace components supplied by sub-contractors from the former Soviet republics, first of all from Ukraine. This industry-wide process started right after the disintegration of the USSR in 1991, but came to the forefront in 2014. Soyuz prepares for new tourists (INSIDER CONTENT) In addition to replacing imported electronic components, the developers also continued introducing gradual system improvements aboard the spacecraft and addressing newly discovered technical issues. Most significantly, the ship was adapted for carrying a pair of tourists. Soyuz to get upgrades to fly beyond 2024 (INSIDER CONTENT) Despite a number of recent improvements in the Soyuz MS crew vehicles and Progress MS cargo ships, the venerable spacecraft series would need another major overhaul, if they were to continue flying beyond 2024, which was practically inevitable at the turn of the 2020s. Upgrades of emergency escape system (INSIDER CONTENT) In order to continue delivering crews to the ISS, after 2024, Soyuz-MS needed an upgrade of the Emergency Escape System, SAS, to get rid of obsolete components developed at the dawn of the Space Age. Soyuz tests new navigation instruments (INSIDER CONTENT) In the course of gradual improvements to the Soyuz-MS variant, engineers at RKK Energia conducted flight testing of some experimental hardware for the ship's Motion Control and Navigation System, SUDN. The trials were conducted in the so-called "telemetry mode" meaning that the new instruments were fully functional aboard the vehicle and their performance could be monitored, but their data was not actually used for navigating the vehicle. Can Soyuz be modified for the new Russian station? (INSIDER CONTENT) The return to the idea of launching the post-ISS Russian station to the tried-and-tested 51-degree orbit, rather then a hard-to-reach near polar orbit, also renewed interest toward employing the veteran Soyuz spacecraft for the transport to the future outpost.
Summary of Soyuz MS missions:
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||