|
ExoMars-2020 (formerly ExoMars-2018) The ExoMars project will provide a rare opportunity to crack one of the most popular and intriguing scientific mysteries of the modern time - whether life ever existed on Mars. First conceived in Europe as a rover mission, ExoMars was later split into a two-part program developed jointly by NASA and ESA. With plans for returning samples of the Martian soil pushed beyond 2020, ExoMars became one of the most advanced ventures meant to explore the Red Planet during the 2010s. However by 2011, NASA essentially dropped out from the project, leaving it at the brink of cancellation... unless Russia would agree to provide rockets for the dual mission...
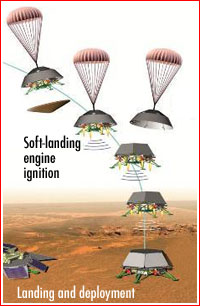
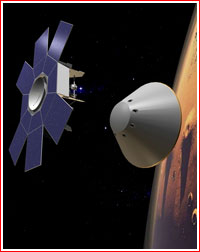
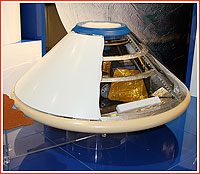
Origin of the ExoMars project In 1999, a group of scientists issued a so-called Red Book report, which urged the European Space Agency, ESA, to send a mobile life-searching lab to Mars. Within two years, ESA's Aurora Exploration Program included planning for an Exobiology Multiuser Facility, EMF, which by 2002 was given much the better-sounding name of ExoMars. During the initial planning known as Phase A, it was decided to launch a two-section vehicle on a single Soyuz-2-1b rocket from Kourou, French Guiana. Upon approaching Mars, the carrier module would release the descent module with a 120-kilogram rover. Both the static lander and the rover would carry scientific instruments and function for at least six months. The mass of the rover's scientific payload was at the time estimated at 10 kilograms. In 2005, at the beginning of Phase B1 of the project, the launch of the ExoMars was delayed from 2009 to 2011. Around 2006, the project was broadened in scope but had to be delayed again from 2011 to 2013 and switched from the Soyuz-2-1b launch vehicle to the Ariane-5 rocket, with the Proton rocket also under consideration. In October 2008, ExoMars was delayed again from November 2013 to January-February 2016. In July 2009, the ExoMars had to be delayed one more time from 2016 to 2018. However, based upon an agreement with NASA reached at the same time, the mission was also switched from Europe's Ariane-5 to the US Atlas rocket. More importantly, the rover launch would now be preceded by a test lander and by the orbiter, both heading to Mars on one rocket in 2016. Then, in April 2018, NASA's Atlas rocket would launch the ExoMars rover and a smaller NASA rover (Mars Astrobiology Explorer-Cacher, MAX-C) also with the goal of looking for signs of life on Mars but with a different type of instruments. The rovers were scheduled to land in the same location on the Red Planet in January 2019 with the help of NASA's controversial "sky crane" system. Originally developed by the Jet Propulsion Laboratory, JPL, for the Curiosity rover, the "sky crane" used four steerable engines to slow the nested rover down and to eliminate the effects of any horizontal winds or sideway movement from the previous traditional descent under a parachute. When the vehicle has been slowed to nearly zero velocity, the rover was to be released and lowered from the descent stage on a bridle and an "umbilical cord". When the on-board computer senses that touchdown is successful, it was to cut the cord and the bridle. The "sky crane" was then fly away to crash at the safe distance from its free-standing payload. Thanks to a highly intelligent navigation system, a pair of mobile robots would then travel for several miles across the Martian landscape. The European spacecraft would use a ground-penetrating radar to locate subsurface features associated with the past presence of water. It would then drill as deep as two meters below the surface to extract samples for in-situ analysis. The ESA governing council formally approved that plan in December 2009, however, as often happens to troubled ventures joining together, the entire alliance collapsed in 2011, when NASA was unable to secure funding for the launch of both missions. The ExoMars rover and its mission As of 2011, the 270-kilogram ExoMars rover was expected to carry eight instruments with a total mass of 14.4 kilograms, including a panoramic camera, a ground-penetrating radar for geochemical studies and a robotic biological lab designed to search for signs of life in the alien world -- a discipline which became known as exobiology. The panoramic camera would be mounted on a 1.7-meter high mast, also carrying a navigation stereo camera and a high-resolution imager. The rover would sport six flexible wheels. One stationary solar panel would be mounted on its roof in fixed position, but four deployable panels would be capable of tracking the Sun from sunrise to sunset to maximize power input. A special robotic arm carrying instruments was originally planned but was eventually dropped from the design. The engineering experience of the ExoMars project was expected to pave the way to a future mission to return soil samples from Mars to Earth.
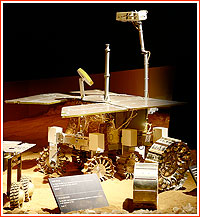
Engineers at the French Space Agency, CNES, test a half-size model of the ExoMars rover at a simulated Martian terrain in Toulouse, France, in May 2016. From Lunokhod to Marsokhod As the nation that ran the very first wheeled vehicle on a surface of another world, the USSR was also at the forefront of Martian rover design. In 1963, the father of the Soviet space program, Sergei Korolev, asked a group of engineers at the VNII Transmash research institute which had previously specialized mainly in chassis for tanks, to design a "lunokhod" or a lunar rover. By June 1964, the organization based in Leningrad (now St. Petersburg) issued its first report outlining the problems and prospects of such a vehicle. The first design proposals for the Lunokhod were formulated in September 1965, while a preliminary design of the vehicle was in the works from May 1965 to February 1966. A more detailed "technical project" was ready by May 1967 and the first manufactured flight version of the chassis was rolled out in 1968. After many challenges and failures, the eight-wheeled vehicle officially named Lunokhod-1 made it to the Moon on Nov. 17, 1970, starting a 10.5-month, 10.5-kilometer trek across the lunar surface. The second vehicle - Lunokhod-2 -- made it to the lunar surface in January 1973 and covered more than 37 kilometers in 125 days. A more advanced lunar rover was fully assembled, but never flew, as the Moon Race had ended. The same engineers at VNII Transmash design bureau, who designed the lunar rover, also built a tiny tethered rover for the first (almost successful) Soviet Mars lander - M-71, so named because it was developed for the launch opportunity to Mars in 1971. According to one story, a leading engineer from VNII Transmash V.V. Gromov saw a piece of ballast on the lander developed by NPO Lavochkin for the M-71 project. Gromov proposed to replace this dead weight with a small experiment designed to test the physical properties of the Martian soil. NPO Lavochkin "gave" VNII Transmash engineers a mere five kilograms of available mass. At the time, VNII Transmash had already been working on a "full-size" Mars rover which was to fly during the 1975 launch window. Obviously, engineers were eager to use the only opportunity to precede the full-scale development of the rover with probing the mysterious Martian surface for its physical and mechanical properties or FMS. At the time, VNII Transmash considered several possible chassis for the future rover including a ski-like system, which was being tested to traverse various obstacles such as a crevice, a bump, or a hill. Along with the chassis, the organization was testing compatible surface prognosis sensors. With the launch deadline in 1971 looming, VNII Transmash decided to dramatically scale-down its ski-like chassis to fit it on a micro-rover which would crawl across the Martian surface on tiny skies within reach of a tether cable. Onboard, the machine would carry a unique penetrating sensor designed to predict the properties of the surrounding surface. Despite its small size, the rover burdened NPO Lavochkin with numerous complications in the M-71 project: a new deployment system would have to place the rover onto the surface after touchdown of the main lander, a special unwinding mechanism for the tether would have to come into play, as the rover moved away from its "mother ship." Finally, the mission's radio system would have to accommodate the operations of the rover. Despite all challenges, the first martian rover was successfully integrated into the M-71 lander and cleared for flight, which was officially announced as Mars-3. (572) Although Mars-3 clearly succeeded in soft landing on the Red Planet in the midst of a severe dust storm on Dec. 2, 1971, signals from the craft mysteriously ceased seconds after touchdown, apparently without delivering any useful data. The rover tucked behind deployment petals of the lander probably never had a chance to move. Nanokhod The first Soviet mini-rover eventually evolved into a caterpillar-like robot known as Nanokhod. In 1992, the German company von Hoerner & Sulger GmbH, or vH&S, picked this concept in an effort to adopt it for the European mission to Mercury called Bepi Colombo. Despite the eventual cancellation of the lander in the Bepi Colombo mission, vH&S continued perfecting Nanokhod for future flight opportunities. Russian rovers during 1980s and 1990s Back in the USSR, Soviet designers continued planning to employ much larger rovers on Mars for sample-return missions. The 8MP spacecraft was expected to land on Mars with a rover which would gather samples and deliver them to the return rocket. In 1983, NPO Lavochkin started the development of a space exploration program extending from 1986 till the end of the 20th century. According to the plan, in 1999, a pair of 7M vehicles would deliver 850-kilogram rovers onto the Red Planet. In May 1987, NPO Lavochkin issued "Basic principles for the development of technical proposals on the MS-92 complex," which also had the manufacturing index M1. Each spacecraft was expected to carry a lander with a 240-kilogram rover. When the preliminary design of the Mars-94 project was completed, its rover reached a mass of 350 kilograms. Unfortunately, the September 1989 revision of the preliminary design for the Mars-94 project no longer contained a rover. With the collapse of the Soviet Union in 1991, the M1 program, then known as Mars-94, had to be delayed for two years to a less favorable window for launches to Mars in 1996. The follow-on M2 project, intended to carry a rover, had to move as well -- to 1998. (533) According to one source, the six-wheel rover for the mission was expected to have a mass of 35 kilograms and carry 15 kilograms of science instruments. However, the project never had a chance to take off until the end of the 1990s. Russian rover proposals for ExoMars In the meantime, at the turn of the 21st century, the development of the rover for the ExoMars mission started with initial studies (Phase A) of a 300-kilogram prototype commissioned by the UK division of the leading European aerospace contractor Astrium and conducted by vH&S. (573) In addition, Bluebotics SA took responsibility for wheel and steering drives, motion control hardware and ETH Zurich (formerly EPF Lausanne) for motion control software and user interface. Utopia Consultancies was developing rigid and flexible wheels. On Feb. 22, 2006, the ExoMars-CM chassis system, built by vH&S and nicknamed Bridget, made its first drive on a sand hill near the town of Schwetzingen, Germany. By April 2008, a second version of the rover, built by vH&S in cooperation with Oerlikon Space from Switzerland and known as ExoMars-B1, started tests. During the early planning of the ExoMars mission in 2004-2006, a Russian firm -- Kemurdzhian NTTs Rover -- a spinoff of VNII Transmash built several prototypes of the chassis, which proved simpler and lighter than a competing design known as CRAB, but lost to it on stability on a complex terrain. Since then, the Russian participation in the European and American unmanned Mars missions has been limited to the contribution of scientific instruments. US Mars rovers In 1997, NASA successfully landed the Mars Pathfinder spacecraft on Mars which carried a miniature rover. Despite its small size and low cost, the mission did capture the public imagination thanks to remarkable images distributed by NASA around the world. In 1994, a pair of much larger and capable NASA rovers landed on Mars, starting multi-year missions on the Red Planet, which brought a wealth of knowledge on the dramatic history of Mars, including convincing proof that salty seas once covered large portions of its surface. NASA followed up on this success with an even larger and intelligent movable robot, replacing its solar panels with a nuclear power source. Named Curiosity, it was originally scheduled for launch in 2009, but had to be delayed to 2011, due to the high complexity of the project. Finally, yet another solar-powered NASA rover was to launch alongside European ExoMars in 2018. It was expected to gather samples to be eventually rocketed back to Earth onboard a future sample return vehicle. Russian involvement Following NASA withdrawal from ExoMars in 2011, Roskosmos tentatively agreed to bail out not just ExoMars but essentially the entire European planetary program, contributing as many as three Proton rockets for deep-space missions. For the ExoMars 2018 mission, Russia took responsibility for the development of the descent module and the landing platform, which would deliver the rover onto the Martian surface. As of May 2012, it was expected that Russia would build the hardware for the lander and supply some of the scientific instruments for the mission. Under a new agreement with Roskosmos expected to be finalized during 2012, the overall design of the 2018 mission has been established, ESA claimed by the middle of the year. The rover teams have returned to the design that had successfully passed its preliminary design review in December 2010. During 2012, the rover teams were studying the overall mission architecture, the interfaces with the descent module, the model philosophy, the schedule and related documentation, ESA said. While discussions on the architecture were advancing, testing activities for the rover elements were ongoing as well, according to ESA. The drill tool electronics engineering model, integrated with the first version of the software, was successfully tested on a new set of Mars-analogue materials and the development and testing of the autonomous navigation system was also progressing. The engineering model of the powder sample handling system was being manufactured to test the complete sample handling and processing sequence by September 2012. Upcoming ExoMars development Following its reconfiguration by 2012, the ExoMars 2018 mission entered Phase B (a feasibility study), to culminate in March 2013 with the System Requirement Review or SRR. The development phase would then kick off, leading to the system's preliminary design review in January 2014 and the system critical design review in January 2016. The project's Final Acceptance Review, FAR, and Qualification Review would be held in October 2017, followed by the launch in May 2018. Thales Alenia Space Italia was the industrial prime contractor for the ExoMars program and the same company also led the development of the Entry Descent Demonstrator Module, EDM, which would precede the rover to Mars in 2016. Alenia also led the development of the Analytical Laboratory Drawer, ALD, which included the crucial Pasteur Payload instruments, and their integration with the Rover, the onboard computer and the EDM’s radar altimeter. Thales Alenia Space France was responsible for the design and integration of the orbiter module. Developments in 2012 According to ESA, the design phase (Phase B) proposal was submitted by industry in November to establish the international cooperation with Roskosmos and their primary industrial contractor, NPO Lavochkin. Several technical meetings to discuss the architecture and the responsibilities of each partner have taken place. Rover development was proceeding as planned, particularly in the areas of the drill, the Sample Preparation and Distribution System (SPDS) and the science payload. The drill test campaign was advancing and the SPDS development was moving towards an end-to-end test of the mechanism breadboards. This was to provide a verification of the overall Analytical Laboratory Drawer (ALD) concept, where the main life-seeking instruments were to be accommodated along with a complex in-situ laboratory preparation facility. A technical workshop was held in September at ESTEC involving ESA, industry, and scientific instrument teams (MOMA, MicrOmega, RLS) to discuss the design of the ALD and optimize the new configuration. The second phase of the ExoMars 2018 mission development known as Phase B officially started in December of 2012 and continued during 2013. Russian and European space agencies along with their key contractors -- NPO Lavochkin and Thales, respectively --continued working on requirements and architectural concept of the spacecraft. In March, an avionics architectural review was held in Moscow to finalise responsibilities for computer, parachute and separation mechanism contributions. It was decided that ESA would provide the computer to manage all operations except surface platform operations. The surface platform, being a Russian responsibility, would be operated using a Russian-supplied computer, ESA reported. In July, in Noordwijk, Netherlands, Russian and European specialists conducted System Requirements Review, SRR, of the ExoMars 2018 project. (As of beginning of the year, the SRR meeting was planned in the second quarter of 2013.) Based on the results of the meeting, two sides formed four working groups on various aspects of the project and compiled a schedule of further interaction, NPO Lavochkin announced on August 21. The next critical milestone in the development of the mission was known as System-Preliminary Design Review, or S-PDR, to be conducted at the agency level. As of beginning of 2013, the event was expected to take place in the 1st or 2nd quarter of 2014.
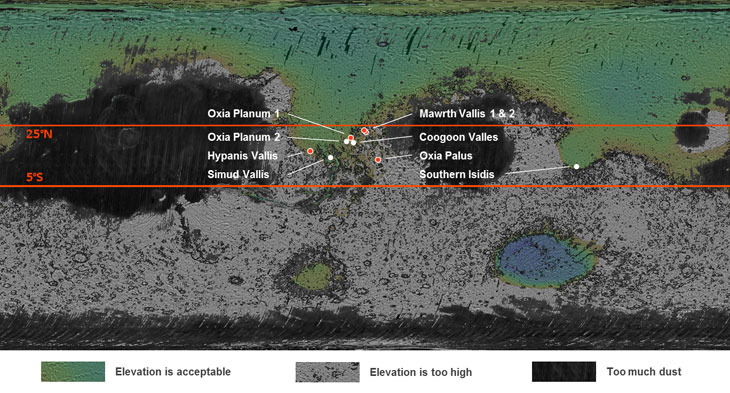
The locations of 8 proposed landing sites for the ExoMars 2018 mission are indicated by circles. Four sites (indicated by red circles) were favoured by scientists at the first ExoMars 2018 Landing Site Selection Workshop, held at ESA's European Space Astronomy Centre near Madrid, from 26 to 28 March 2014. These are: Mawrth Vallis (for which 2, very similar, proposals were received), Oxia Planum, Hypanis Vallis and Oxia Palus. Credit: ESA / D. Loizeau From March 26 to 28, ESA held the first ExoMars 2018 Landing Site Selection Workshop at the agency's European Space Astronomy Centre near Madrid. According to ESA, around 60 scientists and engineers participated, beginning the process of drawing up a shortlist of the most suitable landing locations for the ExoMars rover. Eight proposals that were judged to be most appropriate to the mission's requirements were discussed and an initial shortlist of four favored locations was drawn up at the end of the meeting. ESA narrows down the ExoMars landing site choices
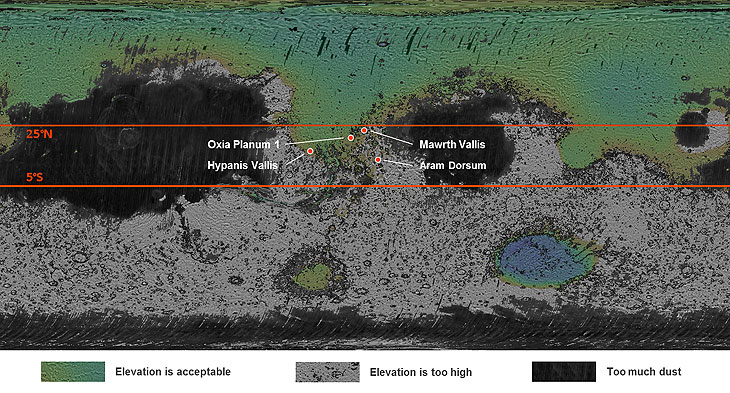
By October 2014, an ESA-appointed panel reduced a number of potential landing sites on the Red Planet from eight to four: Mawrth Vallis, Oxia Planum, Hypanis Vallis and Aram Dorsum. All four are close to the equator. As quoted on the ESA web site: "The present-day surface of Mars is a hostile place for living organisms, but primitive life may have gained a foothold when the climate was warmer and wetter, between 3.5 billion and 4 billion years ago," says Jorge Vago, ESA's ExoMars project scientist. "Therefore, our landing site should be in an area with ancient rocks where liquid water was once abundant. Our initial assessment clearly identified four landing sites that are best suited to the mission's scientific goals." The area around Mawrth Vallis and nearby Oxia Planum contains one of the largest exposures of rocks on Mars that are older than 3.8 billion years and clay-rich, indicating that water once played a role here. Mawrth Vallis lies on the boundary between the highlands and lowlands and is one of the oldest outflow channels on Mars. By contrast, Hypanis Vallis lies on an exhumed fluvial fan, thought to be the remnant of an ancient river delta at the end of a major valley network. Distinct layers of fine-grained sedimentary rocks provide access to material deposited about 3.45 billion years ago. Finally, the Aram Dorsum site receives its name from the eponymous channel, curving from northeast to west across the location. The sedimentary rocks around the channel are thought to be alluvial sediments deposited much like those around Earth's River Nile. This region experienced both sustained water activity followed by burial, providing protection from radiation and oxidation for most of Mars' geological history, also making this a site with strong potential for finding preserved biosignatures. "While all four sites are clearly interesting scientifically, they must also allow for the operational and engineering requirements for safe landing and roving on the surface," adds Jorge. "Technical constraints are satisfied to different degrees in each of these locations and, although our preliminary evaluation indicates that Oxia Planum has fewer problems compared to the other sites, verification is still on going." The next stage of analysis will include simulations to predict the probability of landing success based on the entry profile, atmospheric and terrain properties at each of the candidate sites. The aim is to complete the certification of at least one site by the second half of 2016, with a final decision on the landing site for the ExoMars 2018 rover to be taken sometime in 2017, ESA said. Other developments In the meantime, the Russian team finalized the design of the descent module for the ExoMars rover at the so-called "pre-board level." Also, European engineers completed a Preliminary Design Review, PDR, for the Sample Preparation and Distribution Sub-system, SPDS, which would be a key component of the rover's Analytical Design Laboratory ALD. The manufacturing of engineering qualification models, EQMs, for the system started as well. These units became the first parts of the overall qualification model of the rover's analytical laboratory. According to the official schedule, the whole prototype of the ALD would be built during 2014 and tested in early 2015. On another front, ESA continued procuring components for the rover, for European parts of the Russian Descent Module and for the ESA-provided Carrier Module. In mid-2014, ESA said that overall, the 2018 mission progress had been good and coordination with the Russian partners for all aspects of the mission had continued with intensive contacts at engineering and management levels. (720) By the end of 2014, ESA said that both 2016 and 2018 missions had beem proceeding on schedule. The 2018 mission System PDR was held on November 6, 2014, with a fully integrated ESA and Roskosmos team. In the ExoMars-2018 mission, the System PDR Board meeting was a very important event where both agencies co-chaired the proceedings. Although the review was not complete, and required a further step, significant progress was made by confirming interfaces and allowing procurement to proceed. The Rover Analytical Design Laboratory Sample Preparation and Distribution Sub-system EQM mechanisms were all being manufactured. Procurements for the ESA contributions to the Roskosmos' Descent Module and for the ESA Carrier Module were progressing. Developments in 2016 In October 2016, Roskosmos issued a formal procurement contract to GKNPTs Khrunichev for the Proton-M rocket, which would launch the second ExoMars mission. According to the document, the launch vehicle would have to be manufactured by December 2018.
The ExoMars 2018 mission at a glance (as of 2013):
Russian instruments in the ExoMars 2018 mission (as of 2012):
Evolution of the ExoMars rover specifications:
|
|