| |
|
Docking systems
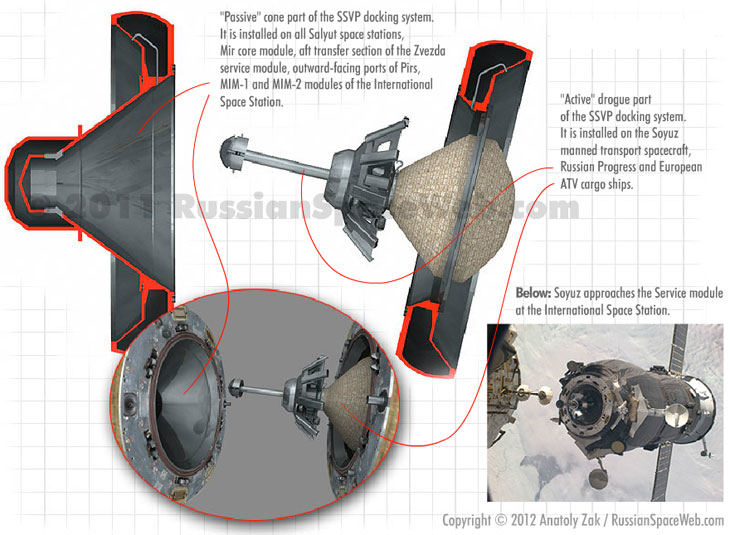
First achieved by the USSR in 1967, docking has been a critical phase of each and every Russian piloted space mission since the middle of the 1970s. During several decades, docking hardware quickly evolved from a mechanical interface with the sole purpose of connecting a pair of spacecraft to a much more sophisticated technology enabling crew members to move between two vehicles in a shirtsleeve environment and the transfer of electric power and propellants between linked ships. Two major families of docking ports emerged in the USSR: one involving an active and a passive vehicle, and another where each spacecraft could play either active or passive role in the rendezvous process. Several cross-over systems between these two major families were also developed and tested in space. The International Space Station, ISS, which united several major space powers in a single venture, featured four types of docking ports designed for crew transfer, as well as six different mechanisms for the attachment of hardware to the exterior of the station. (567) Further efforts have been made by docking system designers aimed at the development of universal mechanisms, which could enable compatibility of spacecraft from different nations during large international ventures in space. Origins of the Soviet docking system The origins of the Soviet docking system were laid in a March 1962 document entitled "A complex of spacecraft assembly in the orbit of the Earth." It envisioned upgraded Vostok spacecraft, which could dock under manual control. However the full-scale development of the Soviet docking system started within the Soyuz project. The manned Soyuz spacecraft was conceived to dock with a booster stage, which would then send it on its way to the Moon. The task of the docking mechanism was limited to a reliable berthing of vehicles and no crew transfer between spacecraft was required. The docking itself was the culmination of a challenging rendezvous process, which, onboard Soyuz, would be accomplished with the help of a motion control and orientation system, or SOUD. The original radar-based rendezvous system onboard Soyuz became known as Igla -- Russian for "needle." Later, it was replaced with the more-advanced Kurs (Course) rendezvous system. Igla and Kurs enabled Soyuz to find its target in space and then steer the ship in the right direction with the help of SOUD thrusters all the way to physical contact between the two vehicles. Around 1962, three departments within Korolev's OKB-1 bureau -- department of projects, general design and electrical mechanics -- started work on docking hardware. The first "flat" mechanism included two rings, known as "pancakes" which would be movable on one spacecraft and stationary on another. During the contact between the two, the movable ring would rotate until floating hooks on both sides of the mechanism would engage and align the two ships. Facing numerous critics, docking engineers came up with a new "drogue-and-cone" concept, which became the basis for modern docking mechanisms. At least two competing designs of this system were proposed by the spring of 1963 by groups led by Vladimir Syromyatnikov and S. Denisov. Korolev approved Syromyatnikov's design and in the fall of 1964, he was appointed a head of the design section responsible for docking and several other systems. In November 1965, the reworked docking mechanism passed major tests clearing the way to a flight-worthy system. (201) By that time, the original lunar goal of the Soyuz spacecraft had been interjected with preparatory missions in Earth's orbit. These flights would rehearse the basic techniques of the latest scenario adopted for the lunar expedition, including a crew transfer between two vehicles. This prompted Korolev to insist on a redesign of the docking system to integrate an internal hatch for crew transfer. However, time pressure and already produced hardware finally forced him to surrender to a proposal from Feoktistov to send cosmonauts dressed in spacesuits to bypass the "dead-end" docking port through hatches to the exterior of the spacecraft and through the vacuum of space. (52) Final tests of the first Soviet docking system took place in the spring and summer of 1966. In November of the same year, the first Soyuz, hidden from the world under name Kosmos-133, carried the docking mechanism into space. However it took several more botched launches and the fatal mission of Soyuz-1, before the automated docking mechanism had a chance to work in space providing a linkup of two unmanned spacecraft on Sept. 30, 1967. Docking system for the L3 project During the second half of the 1960s, OKB-1 developed a lighter docking system for the mass-starved LOK and LK spacecraft of the L3 lunar expeditionary complex. Again, no crew transfer through the docking mechanism was possible, requiring a spacewalk to get back and forth between the linked vehicles. Although in terms of capabilities, it was a step backwards compared to the original Soyuz docking port, a number of engineering solutions for the new system later found their way into later-generation docking ports. (201) In 1967, the TsKBEM design bureau and its branch in Kuibyshev (presently Samara) initiated the development of a military space station, dubbed OIS, which would be periodically serviced by cosmonauts. A critical feature of the outpost was a docking port capable of forming an internal pressurized transfer tunnel for the crew. From the outset, engineers designed the docking port as an autonomous system, which could be easily mounted on various vehicles. (52) Active development of the system started in the fall of 1968. It became known as SSVP for Sistema Stykovki i Vnutrennego Perekhoda - Docking mechanism for docking and internal transfer. SSVP has eight locks on its periphery. The hatches onboard Soyuz form a transfer tunnel with a diameter of 800 millimeters. Although the OIS military outpost never flew, in 1970, the same design of the SSVP docking port migrated to the "civilian" space station program, which later became known as Salyut. Despite successful tests on the ground, the SSVP docking port was damaged during its first use in space onboard the Soyuz-10 spacecraft and prevented a successful transfer of its crew into the Salyut-1 space station in April 1971. In the wake of the failure, developers implemented a number of design changes in the SSVP mechanism, intended to protect the delicate mechanism from accidental loads during docking. A special protective skirt was placed around mechanism's alignment arms. (201) By 1987, the SSVP docking mechanism was strengthened and upgraded to ensure the docking of massive 20-ton modules to the Mir space station. (565) The European Space Agency adopted the Russian drogue-and-cone system under name RDS for the ATV transport ship to resupply the International Space Station. The first RDS docking port came out of production line in 2004. (566) The SSVP mechanism features a rod on the Soyuz spacecraft, which serves as an active spacecraft during the rendezvous, and a receptive cone, installed onboard the space station. During nominal docking, a radio-control system or a pilot bring two spacecraft close enough for the rod on the Soyuz to touch receptive cone of the station. As the Soyuz continues moving toward the station, the rod slides toward the center of the cone, where it is finally reaches a latch in the center of the cone. Electrical motors then retract the rod, pulling two spacecraft together and creating an air-tight transfer tunnel between two spacecraft. In addition, peripheral rings surrounding the tunnel carry interfaces, which enable the transfer of electrical power, control and signaling commands and atmosphere exchange between the two spacecraft. The docking hardware also includes Interface Leak Check System, (SKGS, Sistema Kontrolya Germetichnosti Styka), which monitors interface pressure integrity and equalizes the pressure between two spacecraft, provides a leak check of the transfer hatches, and releases pressure from the docking assembly for undocking. The SKGS is considered a subsystem of both the Life Support System and the Docking and Internal Transfer System. Chelomei's system In the course of the Almaz military space station program, its head, Vladimir Chelomei, delegated the development of "his own" docking mechanism to a team of former aviation engineers from the Myasishev design bureau, which was absorbed by Chelomei's industrial empire during Khrushchev's reign. Unlike the electrically driven mechanisms developed at OKB-1, Myasishev's designers came up with a hydraulic system, which featured a more advanced but heavier mechanism. (201) The 1972 US-Soviet agreement on the first joint Soyuz-Apollo manned mission placed the docking system at the center of a major political development aimed to ease the tensions of the Cold War. A brand-new mechanism, known as APAS, was developed cooperatively by US and Russian engineers specifically for the project. It would enable any spacecraft to play the role of active vehicle, thus making rescue missions in space possible. During the docking process, the active vehicle would extend a special docking ring, while the passive vehicle would have a similar ring in retracted position. Following the hard contact, the extended docking ring of the active vehicle would be retracted pulling two ships together to form an air-tight passageway. In 1975, the first-generation APAS hardware provided docking of Soyuz-19 and Apollo spacecraft in orbit. APAS-89 A new lighter and more compact version of the APAS docking port was under development after 1976. However, it was only presented to the public in 1989 and thus became known as APAS-89. It was designed for the missions of the Buran winged orbiter, enabling its docking with the Mir space station and with the Soyuz spacecraft. However the new port was 60 kilograms heavier than its predecessor and 120 kilograms heavier than the drogue-and-cone SSVP port. Still, two first APAS-89 docking ports in passive configuration made it into space onboard Mir's Kristall module in 1990. A total of three Soyuz spacecraft with such port were ordered to be ready to fly during test missions of Buran, but only one was actually built. It was expected to deliver a crew onboard the Buran orbiter, following its second unmanned test launch into orbit. Following the demise of the Buran program, the Soyuz was launched to Mir and employed its APAS-89 docking port for the first time to link up with Mir's Kristall module in January 1993. NASA adopted the same port for the Space Shuttle and the US segment of the International Space Station, ISS, with its production delegated to RKK Energia. Given the multiple uses of the port onboard the Shuttle, the company introduced a number of upgrades (164) creating a new revision of the docking port known as APAS-95. It was used for the first time in 1995 to link the Space Shuttle to the Mir's Kristall module and later to the station's specialized docking compartment. For the International Space Station program, RKK Energia developed a hybrid port, which would combine the hardware and properties of the drogue-and-cone system with APAS. This became known as Docking Port Active - Hybrid or ASA-G and Docking Port Passive -Hybrid or ASP-G. It was to be installed on the Zarya FGB control module; the Zvezda Service Module, SM; the Versatile Docking Module, USM, and the Science and Power Platform, NEP. RKK Energia started manufacturing hybrid docking hardware in 1996. (164) Several variations of the SSVP system have been developed for various purposes:
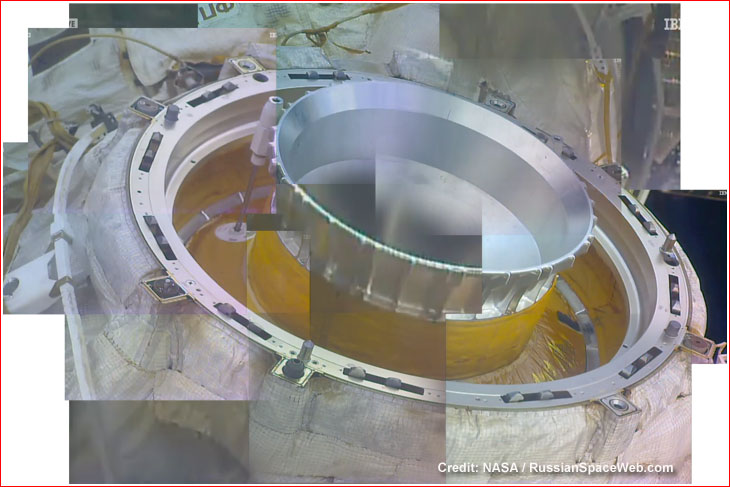
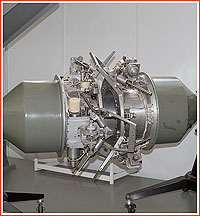
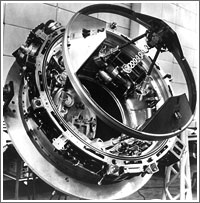
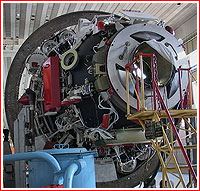
A mosaic of images showing the nadir port of the Zvezda Service Module. SSPA-GM This docking system, which represents a hybrid between a passive cone and the APAS mechanism, could be adapted in flight to receive active Soyuz and Progress ships with drogue-and-cone ports, as well as heavy modules with APAS ports. Known as SSPA-GM, it was designed for the MLM module of the International Space Station. When receiving Soyuz vehicles, it would open a passage with a diameter of 800 millimeters; however, after its in-flight transformation to host future modules, it would form a tunnel with a diameter of 1,200 millimeters. Chinese system Chinese apparently purchased Russian docking hardware for their manned space program. European Space Agency, ESA, reported that in May 2012 its ESTEC center continued discussions about standartisation of docking mechanisms with Chinese Manned Space Engineering Office. Chinese representatives expressed interest in adapting their docking hardware to international standards and also in the defining docking ports with a larger diameter passageway for future modules of the Chinese space station. Docking ports on the modules of the US segment of the ISS The US segment of the ISS also has docking interface featuring eight petals with an external diameter of 1.96 meters and internal square hatch with the side measuring 1.17 meters. At the beginning of 2009, under NASA initiative, the partners involved in the ISS project established a working group tasked with the development of common docking system standards, which could help all sides to collaborate during the use of the space station, as well as during lunar expeditions and possible rescue missions. This work was focused on two projects known as International Berthing and Docking Mechanism, IBDM, and the International Docking System Standard, IDSS. Initially, this work was based on the new and unflown American design known as LIDS, while Russian specialists were insisting on using APAS-based design. In 2012, discussions have taken place with NASA and Canadian space agency, CSA, for the possible definition of a joint development of a new docking system based on the IBDM project. A revised design for the International Standard, which would be compatible with the Russian APAS soft-docking diameter, was developed by the European industry in the summer of 2012. The final definition was to be detailed in a further phase. In the meantime, NASA was completing an internal review on its equivalent docking system to assess current design and the decision to evolve it to a new international standard for soft docking. A Technical Meeting of the five ISS partners was called by NASA in October 2012 at ESRIN, where an agreement in principle for the adoption of the narrow soft-docking ring was expected. According to Russian space officials, at the beginning of 2013, NASA agreed to take APAS design as a basis for the future international interface. The latest version of the standard was signed in December 2016, however a number of technical issues had remained unresolved at the time. Docking port for PTK NP project
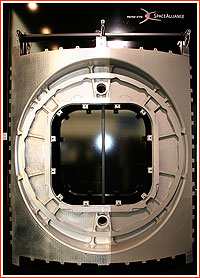
Comparison between the standard docking port on the Soyuz spacecraft (left) and the mechanism developed for the new-generation spacecraft, PTK. Copyright © 2015 Anatoly Zak In August 2015, RKK Energia, the prime contractor in the PTK project, released specifications for a new docking port intended for the PTK NP spacecraft, which would enable a linkup of vehicles as heavy as 30 tons and equipped with any available rendezvous system. Russia finalizes design of a new-generation docking port (INSIDER CONTENT) After several years of re-designs, Russian engineers at RKK Energia completed the development of a docking port intended to link the new-generation spacecraft with an Earth's orbiting space station or with vehicles in lunar orbit. Passive hybrids enable docking of Soyuz and Progress vehicles, as well as heavier modules and future spacecraft with modified docking systems. Four docking ports of this type were expected to be installed on the Node Module of the Russian segment of the International Space Station.
Docking systems of the Russian ISS Segment (INSIDER CONTENT) In its full configuration, the Russian Segment of the International Space Station, ISS, was expected to have a maximum of 21 docking mechanisms, including 15 operating as passive systems and six working as active. As of 2022, the long-term modules of the Russian Segment had six active and 12 passive docking mechanisms for crew transfer. In addition, up to four transport ships could join the segment at the same time using their own active docking ports. Despite some of the docking mechanisms spending more than two decades in space, all ports of the Russian Segment remained fully operational and were certified to fly safely until 2028. MLM Nauka module to feature three docking ports (INSIDER CONTENT)
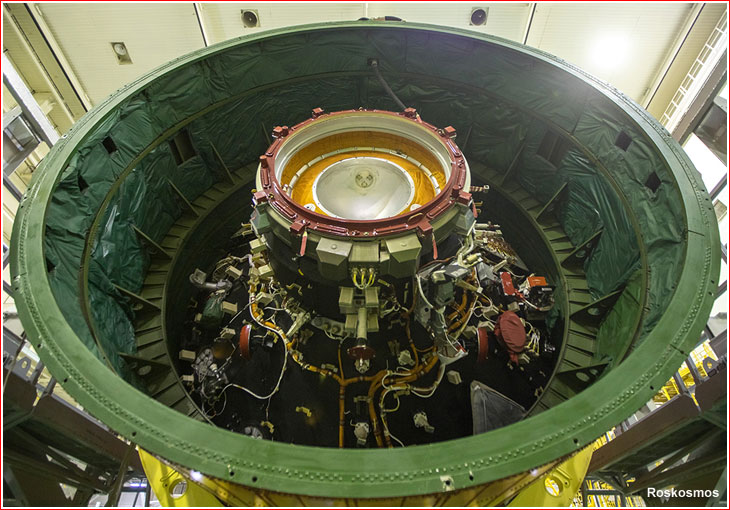
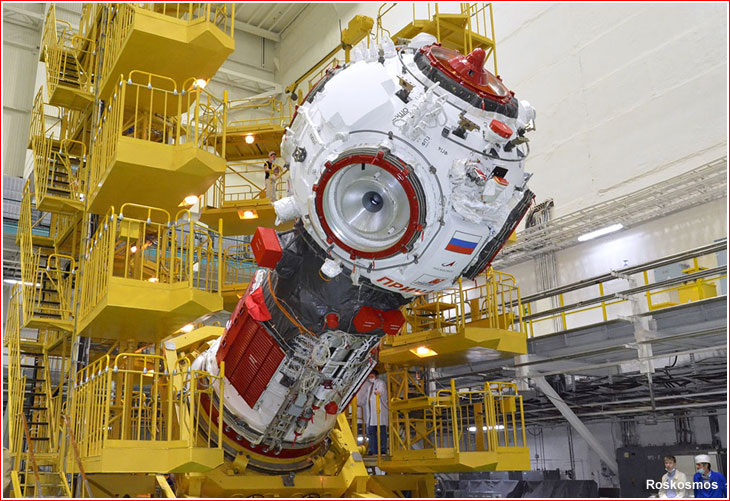
The MLM Nauka module has three different docking mechanisms – one at the front and two on the opposite end of the spacecraft. The front docking port is designed for the attachment of Nauka to the nadir (Earth-facing) port of the Zvezda Service module, while one downward-facing port will be used to further expand the station and the third port, facing along the direction of the flight, will be used for the permanent attachment of a small airlock. Nauka carries docking port - transformer (INSIDER CONTENT) The MLM module was equipped with a unique transformable docking mechanism designed to give the spacecraft the potential capability to serve as the cornerstone of the new Russian space station after the retirement of the ISS. Unique docking port accommodates science airlock (INSIDER CONTENT) The docking mechanism connecting the ShK airlock to Nauka and the associated control avionics unit BUBK is known as SSA-M (from the Russian Sistema Stykovki Aktivnaya - Modifitsirovannaya). RTOd docking mechanism (INSIDER CONTENT) Specifically for the purpose of installing the add-on radiator system, RTOd, on the Nauka module of the International Space Station, ISS, RKK Energia in Korolev developed a unique docking mechanism enabling spacewalking cosmonauts to set up a reliable connection of the complex hydraulic system in orbit. In this project, the company relied on its extensive experience in the design of docking systems going back to the dawn of the space era. Prichal - the ultimate tinkertoy (INSIDER CONTENT)
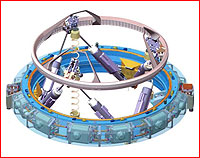
The Prichal Node Module, UM, is the closest Russian engineers got to implementing the plug-in-play concept in space station design. Known to engineers as Article 573GK , the Prichal features six reconfigurable docking ports facing in every direction, allowing space architects to add and subtract other modules as needed.
|
|